
The MisBkit is based on Bioloid technology from the Korean brand Robotis. We selected this technology because it meets most of our criteria of ease of use, quality of components, and cost, with one additional advantage: it allows for a change of scale, moving from playful or service robotics to industrial robotics in the same software environment. Indeed, a wide range of motors is available, all drivable with the same control board and the same software environment. From the Bioloid technology we have primarily maintained the motorization and control system: robust, precise, Dynamixel motors, easily controllable with the CM09 control board, which is powerful, open, and built like an Arduino board, perfectly compatible with auteur-oriented open-source software environments like Processing. In addition, the control board (CM09) is based on an open-source LeafLabs board under an MIT license, a board that Robotis modified to support its Dynamixels motors.
We then combined that system with a set of building blocks we created: solid pieces and structural elements entirely covered in Velcro, making it possible to assemble models and modify the assemblages very quickly, like a kind of “high-definition” Lego. This principle is as simple as it is powerful, since it makes it possible to create prototypes in a few minutes with great freedom of action, and other materials can be associated with the base as long as they also contain Velcro. For instance, structural units taken directly from K’Nex building sets have been added to the toolkit, as has a set of shells and skins for covering our robots, dissociating them from their technical condition (motorized mechanics) and allowing them to be seen simply as objects.
Lately, in a second version of the kit we started using carbon and glass fiber sticks that allow us to create bigger structures that are at the same time lightweight and flexible.
The MisB Kit is essentially composed by three different kinds of elements:
– Structural : used to create the objects’ structure.
– Actuators: mainly servo motors used to give objects different kinds of movement.
– Control : allow to control the motors and thus the objects’ movement (Custom made software and midi controller)
STRUCTURAL ELEMENTS
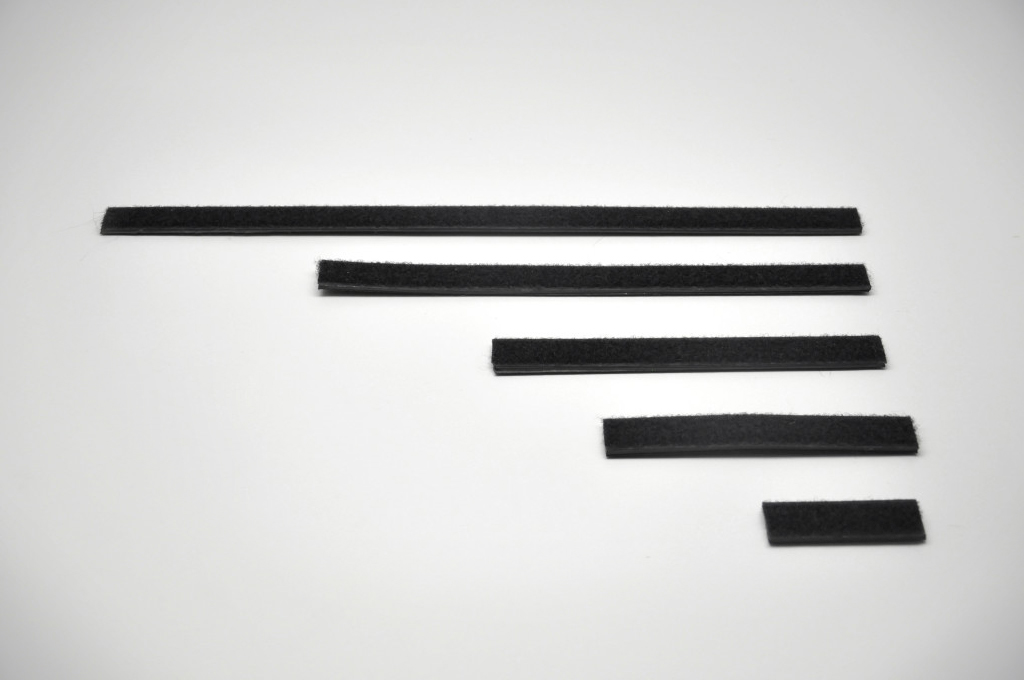
VELCRO ELEMENTS
VELCRO BARS
Length x width (mm): 40x20, 70x20, 150x20, 200x20, 300x20, 400x20
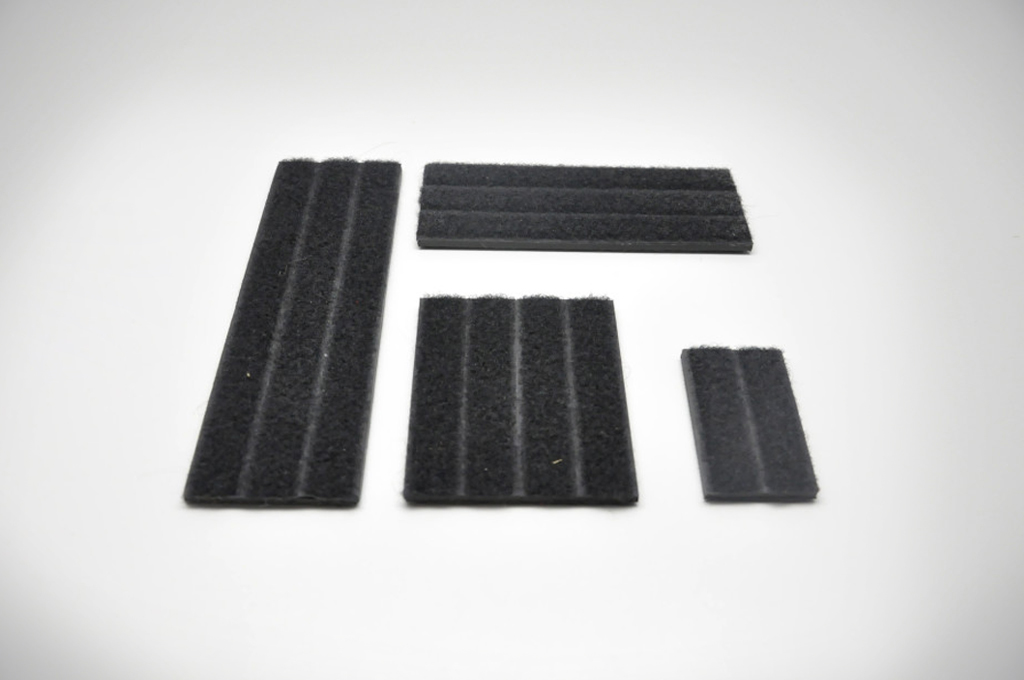
VELCRO ELEMENTS
VELCRO TRAYS
Length x width (mm): 80x100, 200x60, 150x60, 40x60

VELCRO ELEMENTS
VELCRO BAR
Length x width (mm): 250x40

VELCRO ELEMENTS
OREO BAR
Length x width (mm): 70x20
2 holes (diameter 4mm)
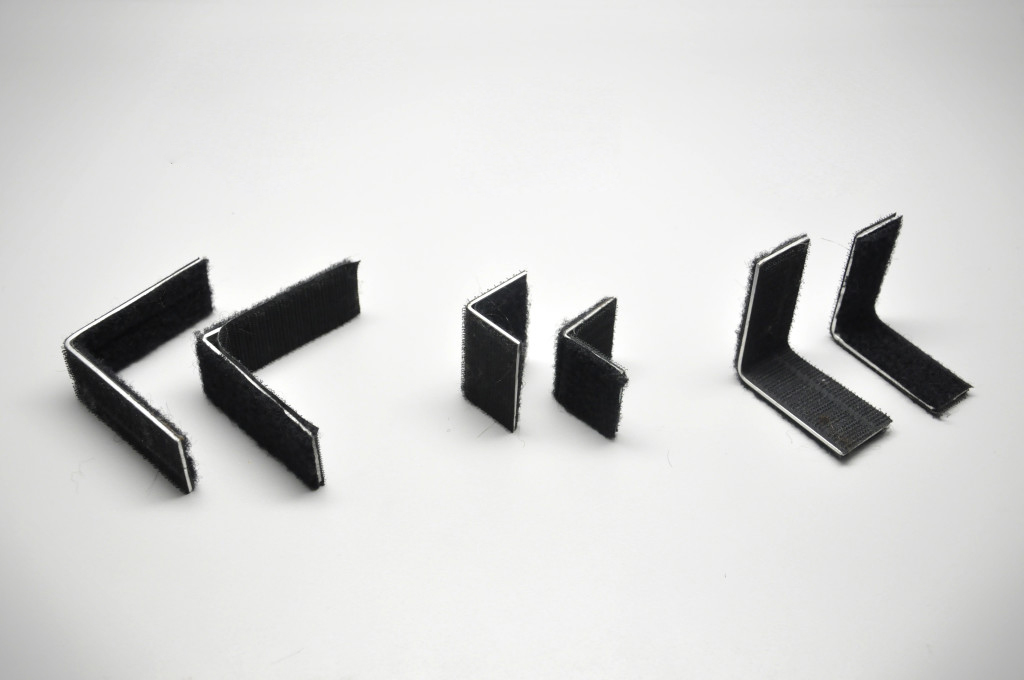
VELCRO ELEMENTS
VELCRO SQUARES
Length 1 x length 2 x width (mm): 60x60x20, 35x35x30, 75x75x30

VELCRO ELEMENTS
VELCRO ADAPTERS
Length x width (mm): 40x100
2 different type: Female-Female, Male-Male
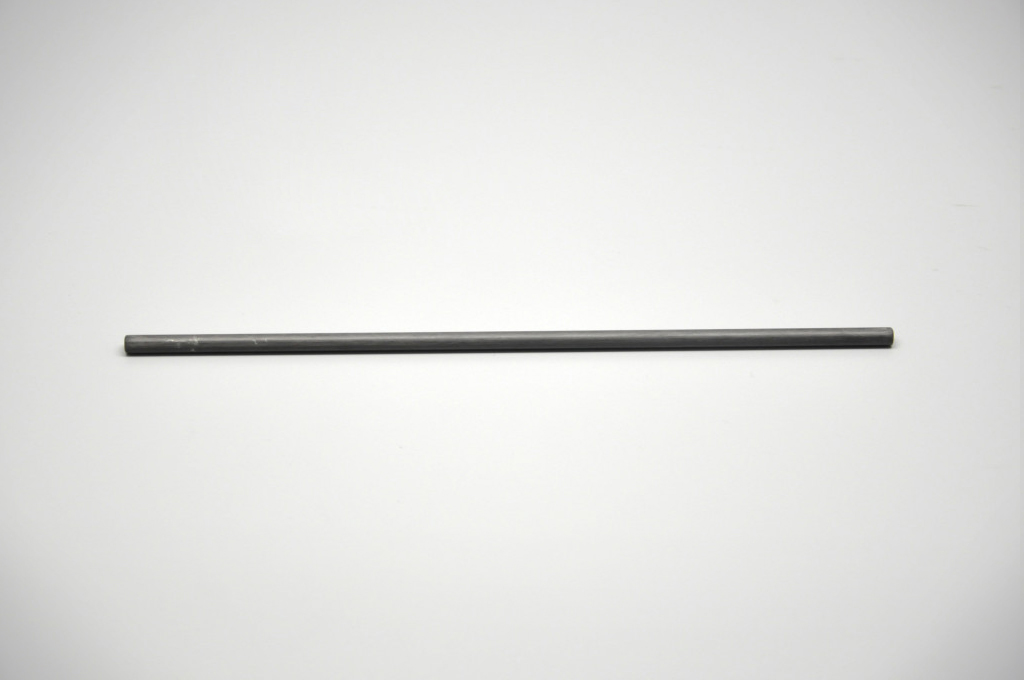
CARBON ELEMENTS
CARBON BAR
Length (mm): 250, 500, 1000
Diameter: 6
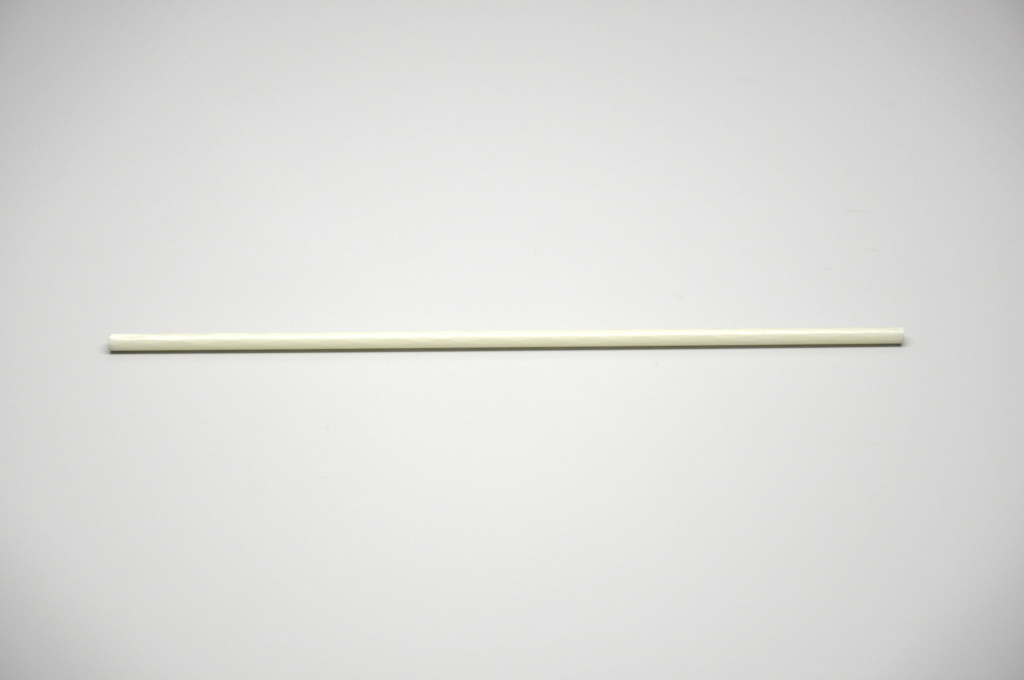
CARBON ELEMENTS
FIBERGLASS BAR
Length (mm): 250, 500, 1000
Diameter: 6
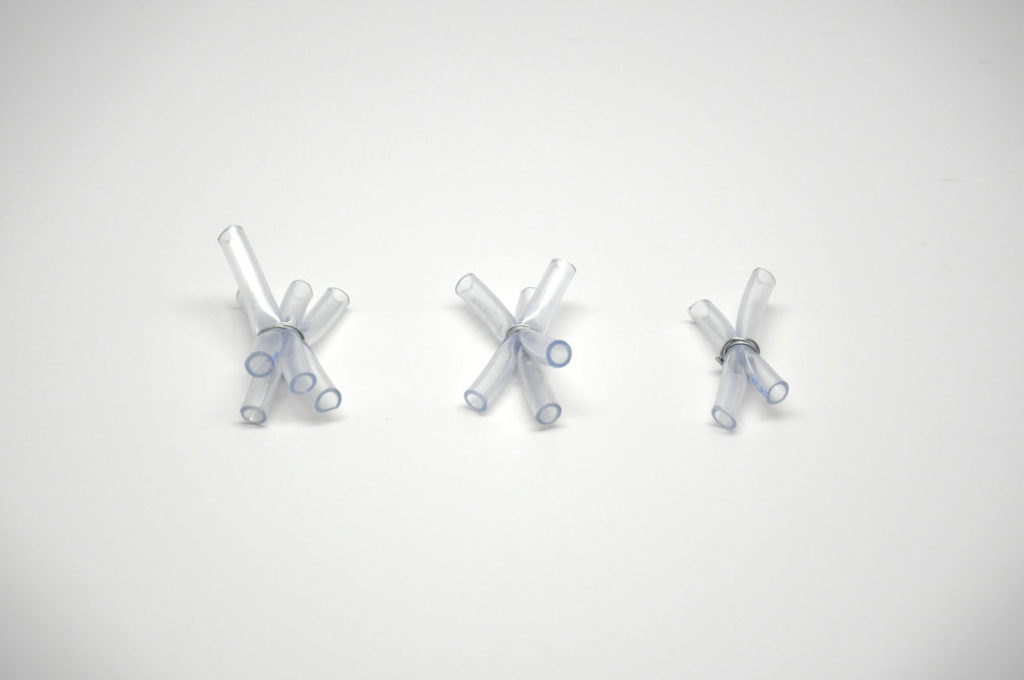
CARBON STICKS ADAPTERS AND CONNECTORS
ACRYLIC CONNECTORS
Length (mm): 55
Internal diameter (mm): 6
Outside diameter (mm): 8
Number of tube : 2, 3 or 4

CARBON STICKS ADAPTERS AND CONNECTORS
40 SILICONE SPHERE
Diameter (mm): 40
8 holes (diameter 6.3mm)

CARBON STICKS ADAPTERS AND CONNECTORS
30 SILICONE SPHERE
Diameter (mm): 30
8 holes (diameter 6.3mm)

CARBON STICKS ADAPTERS AND CONNECTORS
90° SILICONE CONNECTOR
Length x width x height (mm): 40x40x40
3 holes (diameter 6.3mm)

CARBON STICKS ADAPTERS AND CONNECTORS
60° SILICONE CONNECTOR
Length x width x height (mm): 30x30x40
2 holes (diameter 6.3mm)

CARBON STICKS ADAPTERS AND CONNECTORS
33 SPHERE
Diameter (mm): 33
26 holes (diameter 6.3mm)
Download printable 3D models :
small sphere - big sphere

CARBON STICKS ADAPTERS AND CONNECTORS
120° BARS CONNECTOR
Length x width x height (mm): 45x45x14
2 holes (internal diameter: 6.3 - 8.8mm / outside diameter: 12mm)
Angle: 120°
Download printable 3D models : small double connector (120°)

CARBON STICKS ADAPTERS AND CONNECTORS
90° BARS CONNECTOR
Big one - Length x width x height (mm): 40x40x14
Small one - Length x width x height (mm): 20x20x12
2 holes (internal diameter: 6.3 - 8.8mm / outside diameter: 12mm)
Angle: 90°
Download printable 3D models : small double connector (90°) - big double connector (90°)

CARBON STICKS ADAPTERS AND CONNECTORS
60° BARS CONNECTOR
Length x width x height (mm): 40x32x14
2 holes (internal diameter: 6.3 - 8.8mm / outside diameter: 12mm)
Angle: 60°
Download printable 3D models : small double connector (60°) / big double connector (60°)

CARBON STICKS ADAPTERS AND CONNECTORS
HALF-SPHERE CONNECTOR
Length x width x height (mm): 50x50x35
32 holes (diameter 6.3 - 8.8mm)
Angle: 90°
Download printable 3D models : half-sphere

CARBON STICKS ADAPTERS AND CONNECTORS
SMALL 90° BARS CONNECTOR
Length x width x height (mm): 25x25x25
3 holes (internal diameter: 6.3 - 8.8mm / outside diameter: 12mm)
Angle: 90°
Download printable 3D models : small triple connector (90°)

CARBON STICKS ADAPTERS AND CONNECTORS
BIG 90° BARS CONNECTOR
Length x width x height (mm): 40x40x40
3 holes (internal diameter: 6.3 - 8.8mm / outside diameter: 12mm)
Angle: 90°
Download printable 3D models : big triple connector (90°)
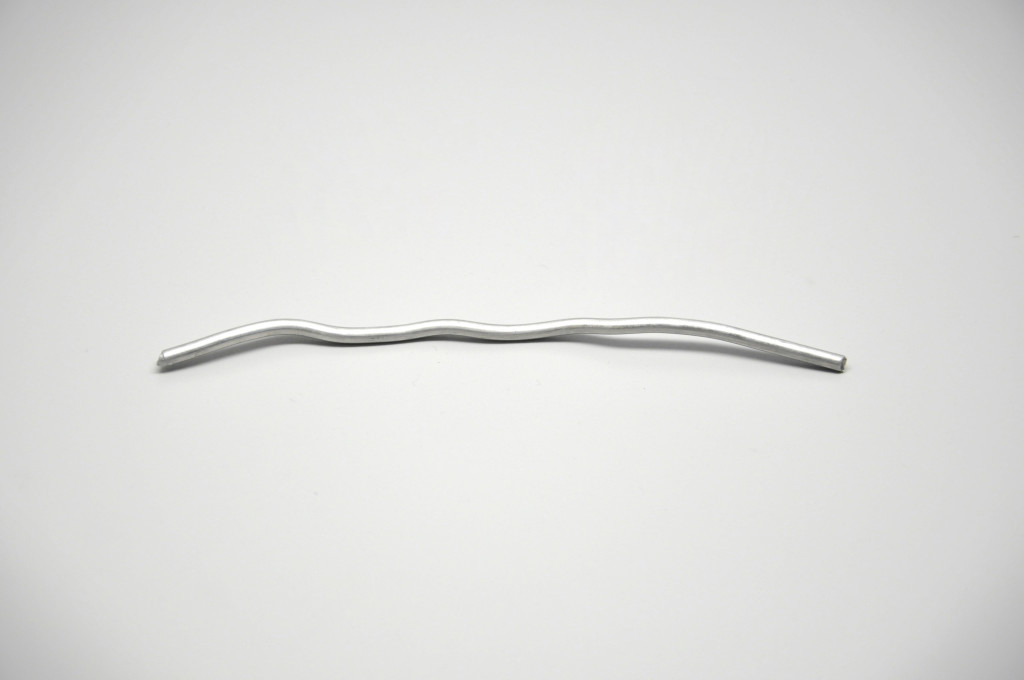
OTHERS ADAPTERS, CONNECTORS AND MATERIALS
ALUMINUM ROD
Length: customizable
Diameter (mm): 4

OTHERS ADAPTERS, CONNECTORS AND MATERIALS
VELCRO STRAP
Length x width (mm): 500x20

OTHERS ADAPTERS, CONNECTORS AND MATERIALS
KINEX ELEMENTS
Green flexible rod - Length x diameter (mm): 188x6
Grey hard rod - Length x diameter (mm): 191x6
Plate - Diameter (mm): 60 - Hooks: 8

OTHERS ADAPTERS, CONNECTORS AND MATERIALS
ELASTIC TIE
Length (mm): 40

OTHERS ADAPTERS, CONNECTORS AND MATERIALS
OREO
Diameter (mm): 40
4 holes (diameter: 4mm)

ADAPTERS VELCRO < > CARBON
VECLRO TUBE
Length (mm): 50
Internal diameter (mm): 6
Outside diameter (mm): 10

ADAPTERS VELCRO < > CARBON
ROTULE
Length x width x height (mm): 30x30x15
Download printable 3D model :
ball joint connector (female part.)
ball joint connector (male part.)

ADAPTERS VELCRO < > CARBON
OREO PLATINE
Diameter x height (mm): 60x13
8 holes (diameter: 6.3mm - spacing: 30mm)
Download printable 3D model : circular “Oreo” connector

ADAPTERS VELCRO < > CARBON
SQUARE CONNECTOR
Length x width x height (mm): 50x50x12
12 holes (diameter: 6.3mm)
Download printable 3D model : square connector
ACTUATORS

AX12 MOTOR
Length x width x height (mm): 50x35x40
Circular velcro male adapter
Circular movement

AX12 MOTOR
Length x width x height (mm): 50x35x40
Velcro male adapter
Circular movement

AX12 MOTOR
Length x width x height (mm): 50x35x40
U Velcro male adapter
Circular movement

RUMBA
Length x width x height (mm): 200x200x95
2 ATX motors
CONTROL ELEMENT

CONTROL PLATE
KORG nanoKontrol2

MisB Kit Software